ICCAS 2019的一篇车道线检测论文。文章使用了自己的车道线数据集(5000张),分割网络很简单,但是后处理创新地提出了 Attentive Voting 方法来判断两条实例的线是否属于同一条车道线。
Model
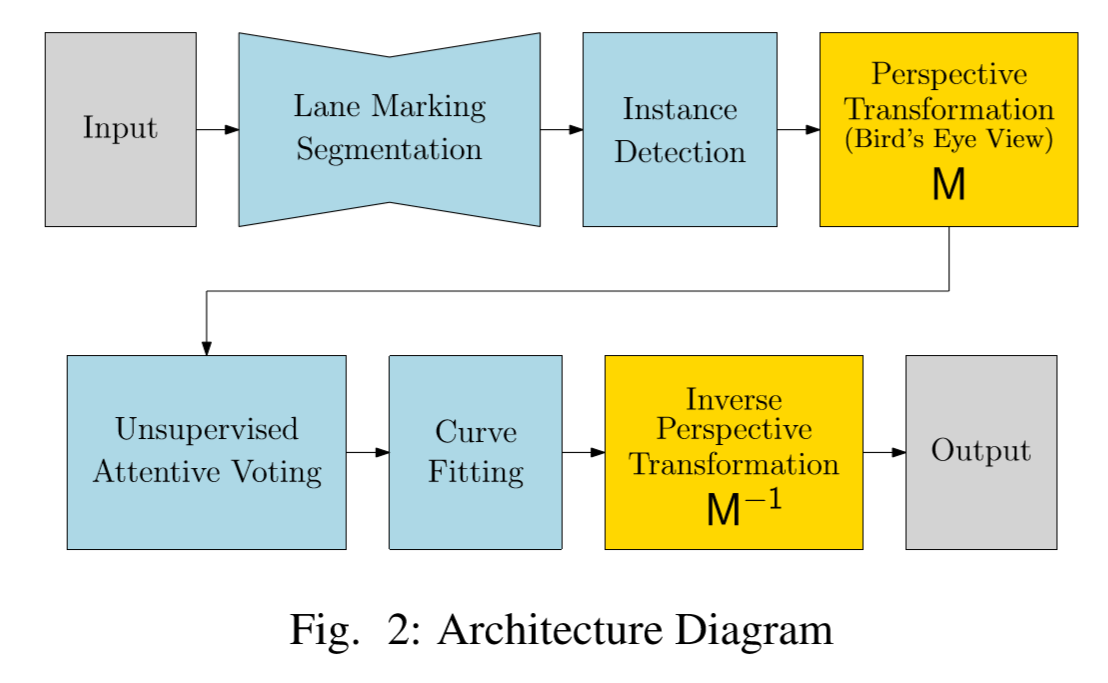
整个车道线检测过程示意图如上图所示:首先是语义分割,然后聚类出实例,然后进行透视变换为 Bird’s Eye View,然后是无监督的 Attentive Voting ,然后曲线拟合,最后逆透视变换回来输出。
-
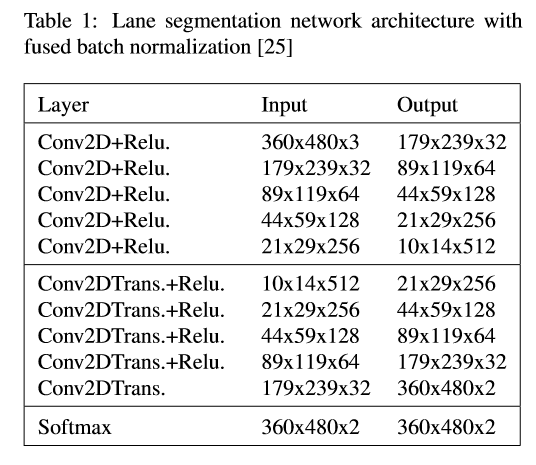
语义分割网络模型如下表所示,就是简单的卷积加反卷积的 U 型结构。损失函数使用的是 soft dice loss。
-
实例检测使用的是广度优先搜索算法。这之后进行透视变换是为了减小之后拟合曲线的多项式次数。
-
无监督的 Attentive Voting 示意图如下所示:
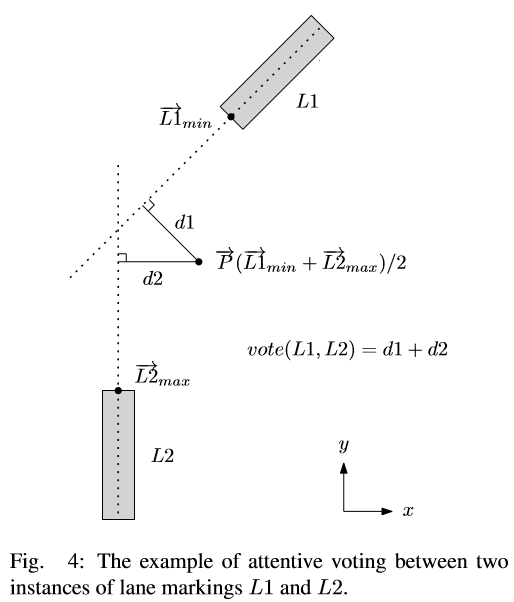
图中 Li 代表车道线掩码实例, 和 代表车道线掩码 Li 最下方和最上方的像素点;车道线掩码 Li 和 Lj 之间的的 Attentive vote 表示为 ,其中 di 表示点 P 到由车道线掩码 Li 拟合出的曲线的法线方程的垂直距离;点 P 论文中没说,从图中可以看出 。如果计算出的 vote 小于阈值 ,则认为这两个实例属于同一条车道线。这个无监督的 Attentive Voting 方法解决了聚类时将同一车道线的不同段错分为两条线的问题。
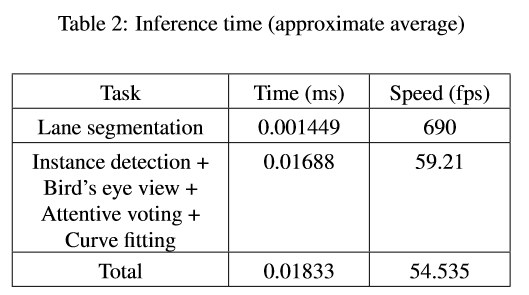
Experiment